TRINAMIC代理商 步进电机驱动 驱动IC 深圳市智联微电子有限公司
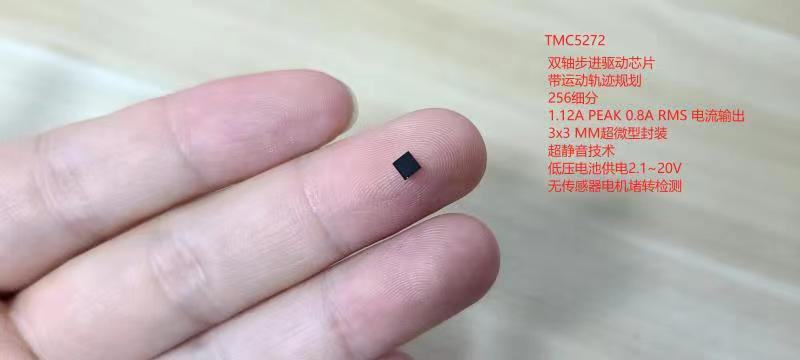
TRINAMIC代理商 步进电机驱动 驱动IC 深圳市智联微电子有限公司ADI-Trinamic推出两款新芯片产品,TMC5272和TMC5271。TMC5272是一颗2.1V 至 20V,2 x 0.8ARMS双轴步进驱动芯片。而且封装好小,为36 WLCSP (2.97mm x 3.13mm)封装。它集成Stealthchop、Spreadcycle两种斩波模式;还集成加减速算法,可通过配置寄存器方式控制电机转速、方向、和位移。
TMC5271和TMC5272差异不大,功能基本相同,不过是单轴的。它的电压2.1V 至 20V,电流最大1.6ARMS。
而且,TMC5272和TMC5271相对之前的产品,还增加运动补偿功能,支持使用编码器进行闭环位置控制,配置寄存器可实现此功能。
该功能是基于编码器位置反馈的简单闭环位置调节。它是一个 P 调节器。比例系数 P > 0 时,该功能启用。此外,相应电机的运动控制器必须处于启用状态,且不处于步进/方向模式。
误差按 X_ACTUAL 和 X_ENC 之间的偏差计算:
Error = X_ACTUALL - X_ENC
公差参数与误差有关。低于公差值的误差将被忽略。P 调节器输出的极限值由参数 VMAX 设置。
en_tol_on_pos_reached 位控制 P 调节器在 M0/M1_RAMP_STAT 寄存器中的位置到达标志 pos_reached 设置时的行为。设置为 0 时,P 调节器始终处于激活状态。该功能适用于每个电机轴。所有相关参数位于电机0 (0x2D) 和电机1 (0x62,TMC5271没有这寄存器) 的 POSITION_P_CTRL 寄存器中,下面表格是寄存器的详细描述。
表 . 闭环位置控制相关参数
| 参数 | 描述 |
|---|---|
| en_tol_on_pos_reached | 一旦电机到达目标位置,启用公差。 0:P 控制器忽略低于公差的绝对误差。 1:只有当相应运动控制器pos_reached 标志(M0/M1_RAMP_STAT[9])设置为 1时,P 控制器才会忽略低于公差的绝对误差。 |
| tolerance | P 控制器误差容限设置 如果误差 < 容差将被忽略 默认值 = 0 |
| P | 位置 P 调节器的比例参数。 P = 0 禁用 P 调节器功能。 P > 0 则启用 P 调节器功能。 系数 1 表示位置偏差为 +5 或 -5 时,修正速度为 +5 或 -5。 默认值 = 0。 |