TRINAMIC代理商 步进电机驱动 驱动IC 深圳市智联微电子有限公司
TRINAMIC代理商 步进电机驱动 驱动IC 深圳市智联微电子有限公司在运动控制领域,步进电机和直流无刷电机(BLDC)是常被放在一起提及的两类电机。
从市场规模看,2024年全球步进电机市场规模超过20亿美元,中国市场占了六成以上。3D打印、医疗器械、安防监控、半导体设备,凡是需要精准定位的地方,几乎都有步进电机在转。BLDC这边,体量更大,2024年规模约210亿美元,年复合增长率保持在8%以上。新能源车、工业机器人、智能家电的高速增长,让BLDC的应用边界一直在往外扩。两者都能精准控制位置,但内部逻辑和适用场景差异极大。
一、步进电机
所谓步进电机(Stepper Motor),就是一种每接收一个电脉冲信号就转动一个固定角度的执行器件。核心特征是开环控制:不需要编码器反馈,脉冲数跟角位移严格对应,发一个脉冲走一步,发多少脉冲就走多远。
它主要由四部分构成:
- 定子,绕有多相励磁线圈,通电后产生旋转磁场,这是驱动力的来源。
- 转子,在磁场作用下跟随转动,不同类型转子决定了电机的性能特性。
- 端盖和轴承,固定定子和转子之间的相对位置,保证同轴度和机械稳定性。
- 输出轴,将转子产生的力矩传递给负载。
按转子结构,步进电机可分为三类:
- VR型,可变磁阻。转子是软铁齿轮,没有永磁体。步距角偏大,典型15度,断电没有保持力矩,精度较低,一般应用于对精度要求不高的开环定位。
- PM型,永磁。转子是圆柱形永磁体,步距角7.5度到90度。断电有保持力,精度中等,仪表驱动和小功率定位里用得最多。
- HB型,混合型。转子是两段齿形铁芯夹一块轴向充磁的永磁体,两段齿错开半个齿距。同时拿了VR的精密齿距和PM的永磁力矩,步距角能做到0.9度,断电有保持力。目前工业上绝大多数步进电机都是这个方案。
步进电机驱动原理的核心是步距角的计算与励磁方式的选择。
步距角是指每接受一个脉冲,转子转过的机械角度,通用计算公式为:步距角=360°/(转子齿数×运行拍数)。其中,运行拍数指定子绕组完成一个完整通电循环所需的脉冲数。以最常见的两相HB型50齿电机为例:整步四拍驱动时,运行拍数=4,步距角=360°/(50×4)=1.8°;半步八拍驱动时,运行拍数=8,步距角=0.9°。
具体到励磁方式,分四档。最基础的是整步,双相同时通电,转矩稳定,最常用。进阶一点是半步,单双相交替通电,步距角直接减半,运转更平滑。再往上就是细分驱动了,对各相电流做正弦余弦精密控制,能把步距角细到1/256整步,大约0.007度,运转顺滑到肉眼看不出来在走步。
| 励磁方式 | 步距角 | 转矩 | 特点 |
| 单相励磁 | 整步 | 小 | 功耗低 |
| 双相励磁 | 整步 | 约单相×√2 | 最常用 |
| 1-2相励磁(半步) | 半步 | 中 | 平滑度提升,分辨率翻倍 |
| 细分驱动 | 整步/4~256 | 高 | 最平滑,步距角最小可至 0.007° |
前文有提到,步进电机的核心特征是开环精确定位,因此优势也很直接:位置误差不累积,保持在步距角的±3%到±5%以内;低速区间转矩大,很多场合不需要减速机构;结构简单,没电刷、没换向器,可靠性高;HB型和PM型断电保持力矩;启停快,正反转灵活,整套系统成本低。
但开环控制也带来几个绕不开的局限。100到300转区间容易共振,严重了直接丢步;600转以上转矩断崖式往下掉,效率只有20%到40%,大部分电变成热量跑了;噪声偏大,低速还可能爬行。最关键的是,开环模式丢步了系统完全不自知,位置偏差无法纠正。
针对步进电机的局限性,国内外驱动芯片厂商均有成熟的解决方案,以下推荐部分驱动选型:
国际产品方面,德国的Trinamic在步进驱动上做了很多年。静音中小功率场景——TMC2240,集成独家StealthChop2静音斩波技术,输出波形接近正弦波,低速时电机跑起来几乎无声,是噪声敏感场合首选。StallGuard2/4无传感器堵转检测功能,无需传感器即可实现失步预警与堵转保护,解决开环丢步不自知的问题。CoolStep根据负载轻重自动调节电流,降低功耗发热。高功率需求可以看TMC5160,驱控一体配合外置MOSFET,内置SpreadCycle高动态斩波和灵活斜坡发生器,首推CNC和工业机器人这些场景。
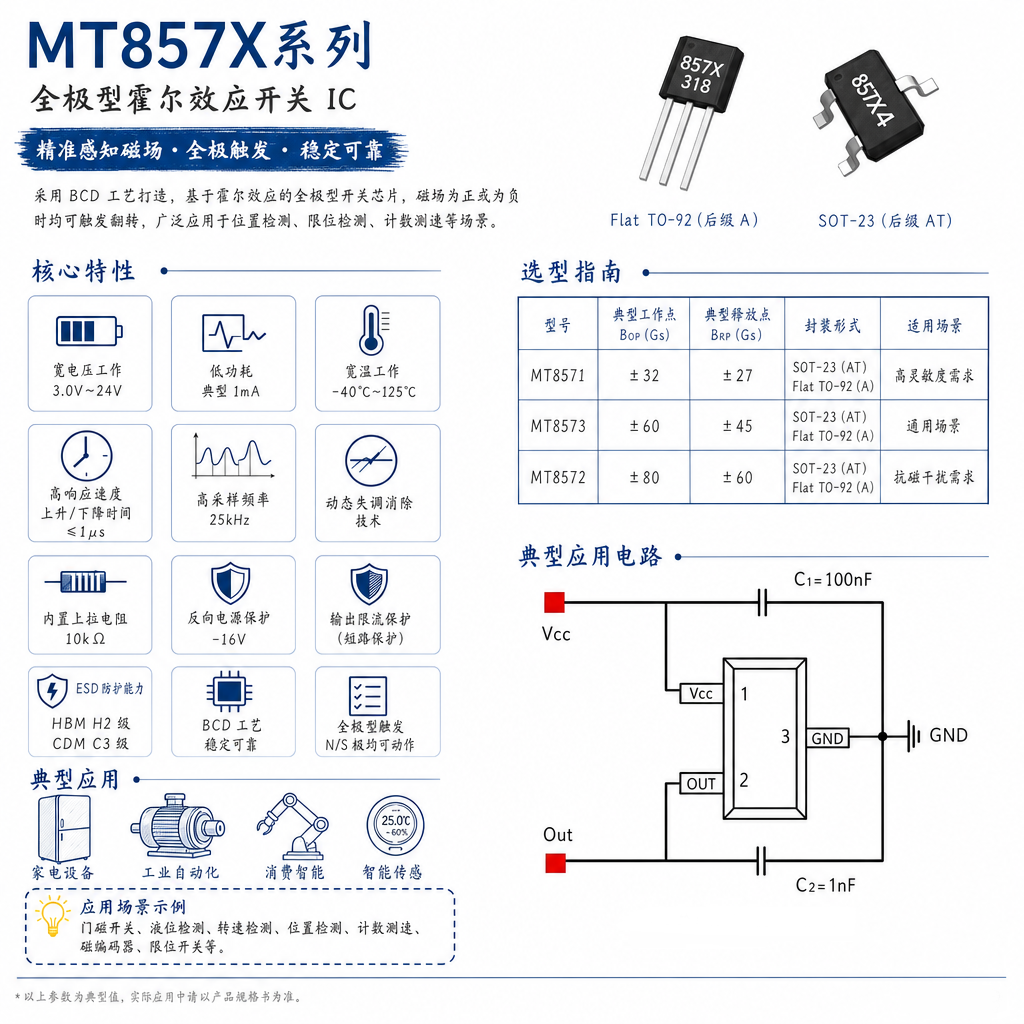
国产高性能产品方面,纳芯微的NSD8381是车规级双相双极步进驱动,微步控制精度够,集成度高,主要用在汽车头灯ADB/AFS调节、HUD位置控制、热管理阀门电机等车载场景。NSD8389-Q1是第二代升级版,精度和可靠性进一步提升,保护机制也更完善。
步进电机最典型的应用场景集中在定位需求上。3D打印机的进给挤出、小型CNC、打印机扫描仪的走纸机构、医疗注射泵和分析仪器、安防云台、半导体晶圆探针台和对准台、产线分拣传送、纺织送纱卷绕、汽车仪表指针,都是它的用武之地。
二、直流无刷电机(BLDC)
直流无刷电机(Brushless DC Motor,简称BLDC),简单说就是把传统直流有刷电机的机械电刷换向换成了电子换向:定子绕线圈通交流电产生旋转磁场,转子用永磁体跟着磁场转,不再需要物理接触的电刷来切换电流方向。没了电刷摩擦,效率更高、寿命更长、噪声更低。
结构上,BLDC主要由转子、定子、位置检测、电子控制器四部分组成。
其中,转子主流用钕铁硼(NdFeB)永磁体,磁场强度大,提供恒定励磁磁场,这是它高效率的底子。定子是硅钢片叠压铁芯,嵌了三相绕组U、V、W,可以Y形也可以三角形连接。位置检测用于检测转子位置,为换向提供信号依据,有两种方案:有霍尔传感的用三只霍尔元件,成60°或120°间隔布置,检测可靠但多了器件和走线;无感的靠反电动势过零检测判断转子位置,省了传感器但低速时反电动势太弱,一般先开环启动再切闭环。最后是电子控制器,包含三相逆变桥及驱动电路,实现电子换向。
转子构型分两种。内转子惯量小响应快,适合高速伺服;外转子惯量大低速扭矩稳,无人机航模风机上基本是这种。
驱动原理上,最基础的是三相六步换相。6只MOSFET组成三相桥,每次两两导通,每60°电气角切换一次,完整一转走6步。电流波形是梯形波,换相瞬间会产生转矩脉动,这是六步法的天生缺陷。
| 步序 | 导通MOSFET | 通电相 | 电角度区间 |
| 1 | Q1-Q4 | U+V− | 0°~60° |
| 2 | Q1-Q6 | U+W− | 60°~120° |
| 3 | Q3-Q6 | V+W− | 120°~180° |
| 4 | Q3-Q2 | V+U− | 180°~240° |
| 5 | Q5-Q2 | W+U− | 240°~300° |
| 6 | Q5-Q4 | W+V− | 300°~360° |
三相六步换相状态
BLDC高性能场合一般用的是FOC磁场定向控制。核心思路是通过Clarke变换把三相静止坐标映射到两相静止坐标系,再通过Park变换映射到两相旋转坐标系。这一步做完,定子电流就被解耦成了励磁分量和转矩分量,两个分量可以独立控制。各自走PI调节(比例积分调节),最后反Park加SVPWM输出到三相桥。整套下来电流波形正弦化了,转矩脉动基本消失,运行安静平滑。
BLDC的优势很直观:效率高,85%到97%,宽转速,从100转到十几万转都能覆盖,功率密度每公斤1到10千瓦;同时,没电刷,寿命长免维护,FOC控制下噪声、振动低,闭环带宽能到几百Hz。
对应短板也得正视。整套控制器成本比步进方案高不少;FOC算法本身有门槛,对开发人员要求较高。高频PWM开关会带来EMI问题;无感方案在低速段基本不可靠;钕铁硼超过120到150度可能退磁;上下桥臂直通是致命风险,死区保护必须到位;制动时能量回馈也需要专门处理。
对于BLDC驱动,推荐选型如下:
TMC4671是一颗全硬件集成的伺服控制器,FOC算法直接跑在芯片硬件里,不占主控MCU算力。支持BLDC、PMSM、两相步进、直流有刷,基本通吃。开发门槛一下子拉低不少,不用从零写Clarke和Park变换。搭配TMC6200大功率门驱动器,功率范围从几瓦覆盖到几千瓦,正压呼吸机、高性能伺服、机器人关节是它的典型地盘。
国产IC,纳芯微的NSUC1610是车规级AEC-Q100认证的集成电机驱动芯片,内部集成了4路半桥驱动器、高压LDO和LIN收发器。一颗芯片就能管住小功率BLDC、有刷直流甚至步进电机,主打用在汽车电子的执行机构上,散热风扇、水泵、油泵这些。最大优势是外围器件少,节省BOM成本和PCB面积。
BLDC的应用场景主要集中在对效率和转速有要求的场景。电动汽车驱动电机和EPS、无人机和航模的外转子电机、变频空调洗衣机里的压缩机、工业伺服和机器人关节、医疗手术工具和呼吸机离心机、HDD主轴和散热风扇。新能源和智能家居持续扩张,它的应用范围还在扩大。
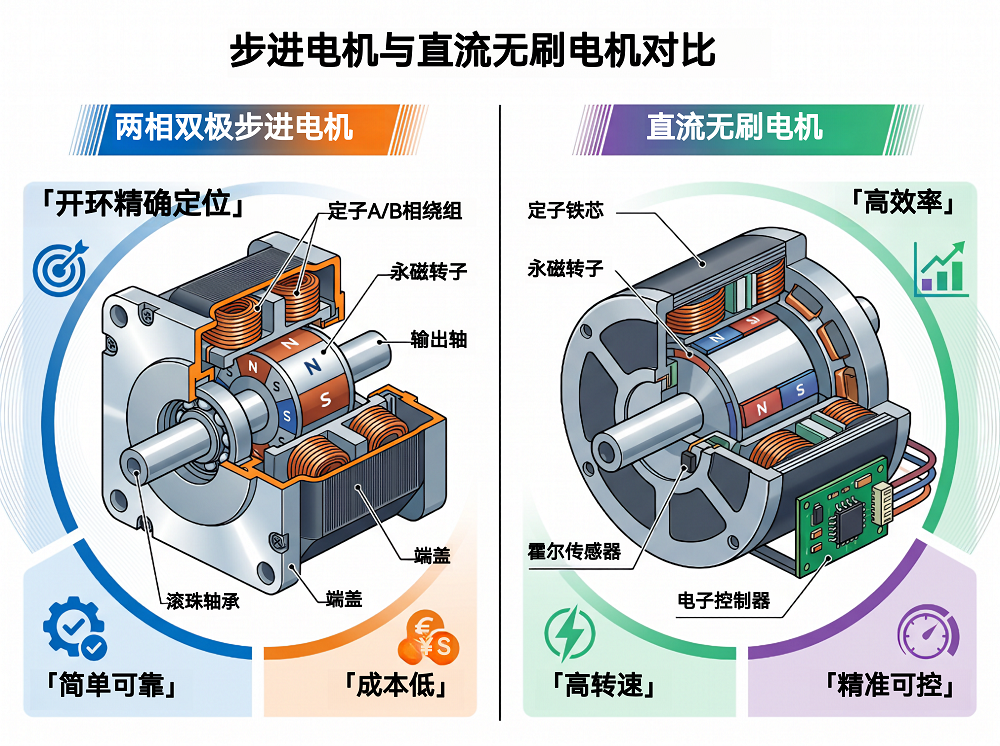
三、步进电机与直流无刷电机对比分析
步进电机和BLDC有不少相似之处。外形都是圆柱体,定子都绕线圈,HB型步进的转子跟BLDC一样用永磁方案(存在结构差异:HB转子为两段带齿铁心夹一片轴向充磁的永磁体,而BLDC转子多为表贴式或内嵌式的径向充磁磁环),都靠旋转磁场产生力矩。就连FOC这套控制方法,两种电机都能跑,TMC4671甚至一颗芯片同时支持两者。
但它们的核心定位完全不同。步进电机是一个位置执行器,第一使命是定位,转速和转矩是定位过程中的副产品。BLDC是一个转速转矩源,天生为了持续旋转,定位需要外加编码器闭环才能实现。
这个本质差异带来一组反差。步进电机低速转矩大,一到高速就崩,因为磁场的步进节奏跟不上转子惯量。BLDC正好反过来,低速要闭环保精度,高速却跑得又稳又猛,因为换向频率可以跟着转速自动调节。驱动方式也不同,步进靠脉冲序列一步一步走,BLDC靠电子换向连续推着转。
两款电机对比信息
| 对比项目 | 步进电机(HB型主流) | 直流无刷电机(BLDC) |
| 效率 | 20%~40% | 85%~97% |
| 转速范围 | 0~600 rpm(有效),空载最高1200~3000 rpm | 100~150,000 rpm |
| 功率/转矩范围 | 0.1~30 N·m转矩范围 | 0.1 W~1 MW+ |
| 功率密度 | 较低 | 1~10 kW/kg |
| 定位精度 | ±3%~5%步距角(开环),细分后可达0.007° | 取决于编码器分辨率(闭环) |
| 控制方式 | 开环为主(脉冲/方向) | 闭环(六步换相/FOC) |
| 低速性能 | 低速大转矩,但<30rpm可能爬行 | 需闭环支持,无感方案低速受限 |
| 高速性能 | 200~600rpm以上转矩大幅衰减 | 高速性能优异,可弱磁扩速 |
| 保持转矩(断电) | HB/PM型有 | 无 |
| 转矩脉动 | 步进特性导致固有脉动 | 六步换相有脉动,FOC消除 |
| 噪声与振动 | 较大(尤其共振区) | FOC下低噪声低振动 |
| 驱动器复杂度 | 低(脉冲分配+电流控制) | 高(三相逆变桥+FOC算法) |
| 控制器成本 | 低 | 高 |
| 寿命 | 长(无电刷) | 长(无电刷) |
| 温升 | 发热严重 | 效率高,温升较低 |
| KV值 | 不适用 | 50~10,000 rpm/V |
| PWM频率 | 步进电机通常由脉冲/方向接口控制位置,内部电流环采用PWM斩波 | 8~50 kHz |
| 极对数 | 转子齿数决定步距角 | 2~20 |
| 额定电压 | 通常12~48 V DC | 3~800 V |
选型决策
针对两款电机怎么选,可以顺着这几个问题捋一遍:
- 需不需要断电保持位置?→ 需要就是步进。
- 工作转速是否超过600转?→ 超过就用BLDC。
- 开环精度够不够?→ 够用选步进,不够就BLDC加编码器。
- 对效率和散热的敏感程度。→ 敏感就BLDC。
- 团队有没有FOC开发能力?→ 没有就先跑步进方案。
- 预算有限→ 选步进,充裕就看前面几条的权重。
四、总结
步进电机和BLDC各有各的根基。步进电机靠开环精确定位和低成本,在3D打印、医疗器械、安防监控、半导体设备等定位场景中地位稳固。BLDC凭高效率和宽转速范围,在新能源车、工业机器人、智能家电等旋转驱动场景中持续增长。两者在结构、驱动原理、性能曲线上的差异决定了各自的应用边界,选型时需要综合定位需求、转速范围、效率要求、控制能力和预算来权衡。
如需了解更多电机驱动选型信息或申请相关样品,可联系:sales@chiplinkstech.com;13924675549 陈工。
附样品申请:
微信公众号