 TRINAMIC代理商 步进电机驱动 驱动IC 深圳市智联微电子有限公司
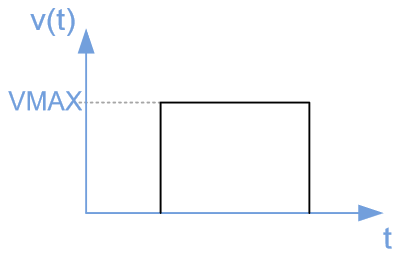
TRINAMIC代理商 步进电机驱动 驱动IC 深圳市智联微电子有限公司1,无斜坡运动
涉及到的参数只有VMAX。
2,无断点的梯形四点斜坡
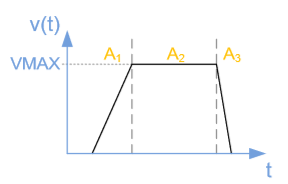
VBREAK=0,其他参数AMAX、DMAX、VMAX按需求调节;
利用线性斜坡将速度连续地变为VMAX。只有AMAX和DMAX定义加速/减速坡度。AMAX决定了从绝对低速到绝对高速的上升坡度,而DMAX决定了从绝对高速到绝对低速的下降坡度。加速斜坡和减速斜坡各有一个加速和减速值。
3,有断点梯形斜坡
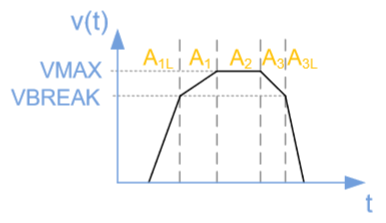
按需求调节相关参数VBREAK、ASTART、AMAX、VMAX、DMAX、DFINAL;
较上一种斜坡,引入了ASTART、DFINAL的概念,同时,还需要根据需求设置适当的VBREAK值,加速/减速系数在VBREAK时改变。ASTART和DFINAL在VBREAK以下有效,而AMAX和DMAX在VBREAK以上有效。AMAX和ASTART决定了从绝对低速到绝对高速的上升坡度。DMAX和DFINAL确定从绝对高到绝对低速度的下降坡度。
4,六点斜坡
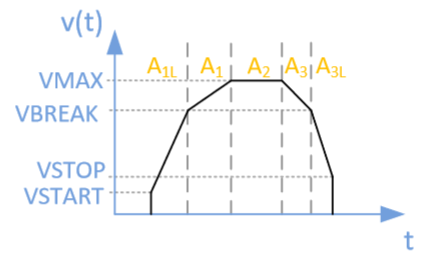
按需求调节相关参数VBREAK、ASTART、AMAX、VMAX、DMAX、DFINAL、VSTART、VSTOP(注: VBREAK > VSTOP,VSTART < VSTOP);,
5,S形斜坡
关于S形斜坡,除了以上所涉及到的参数(VBREAK、ASTART、AMAX、VMAX、DMAX、DFINAL、VSTART、VSTOP)外,还引入了几个新的参数,BOW1、BOW2、BOW3、BOW4;
BOW1:定义增加绝对加速度值的值;
BOW2:定义减小绝对加速度值的值;
BOW3:定义增加绝对减速度值的值;
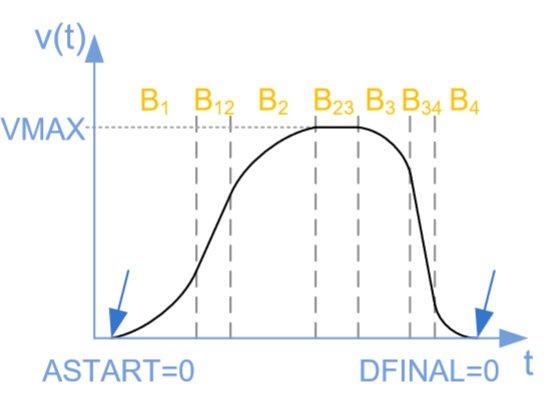
BOW4:定义减小绝对减速度值的值;5 ASTART=0、DFINAL=0时:
此种情况无初始加速度和最终减速度,也没有初始速度和停止速度。
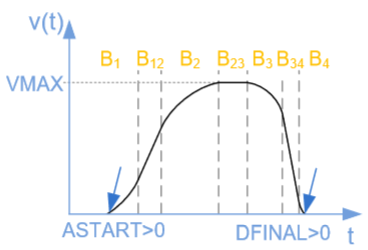
5 ASTART>0、DFINAL>0时:
包含了初始加速度和最终减速度,但无初始速度和停止速度。
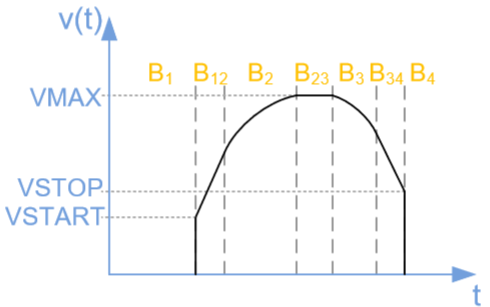
引入VSTART、VSTOP的S形斜坡:
包含了初始加速度和最终减速度,以及初始速度和停止速度。
TRINAMIC的先进六点加速度斜坡支持更快的定位。通过自由配置线性启停频率,在高速的时候增加一个减加速度来减少在标准加速度结束时候的过冲。
在一些高速定位场合或对过冲敏感,或物体惯量较大的场合,就需要S型正弦加减速波形。








评论前必须登录!
注册